Rep-Walker Mutant - 2014
Building on the idea of Sho from Japan, in early 2014 I designed and manufactured an unproblematically printable and reasonably priced motorized version of his Shelmo robot.
You can also extend the repwalker with the animatronic eyes that I constructed:
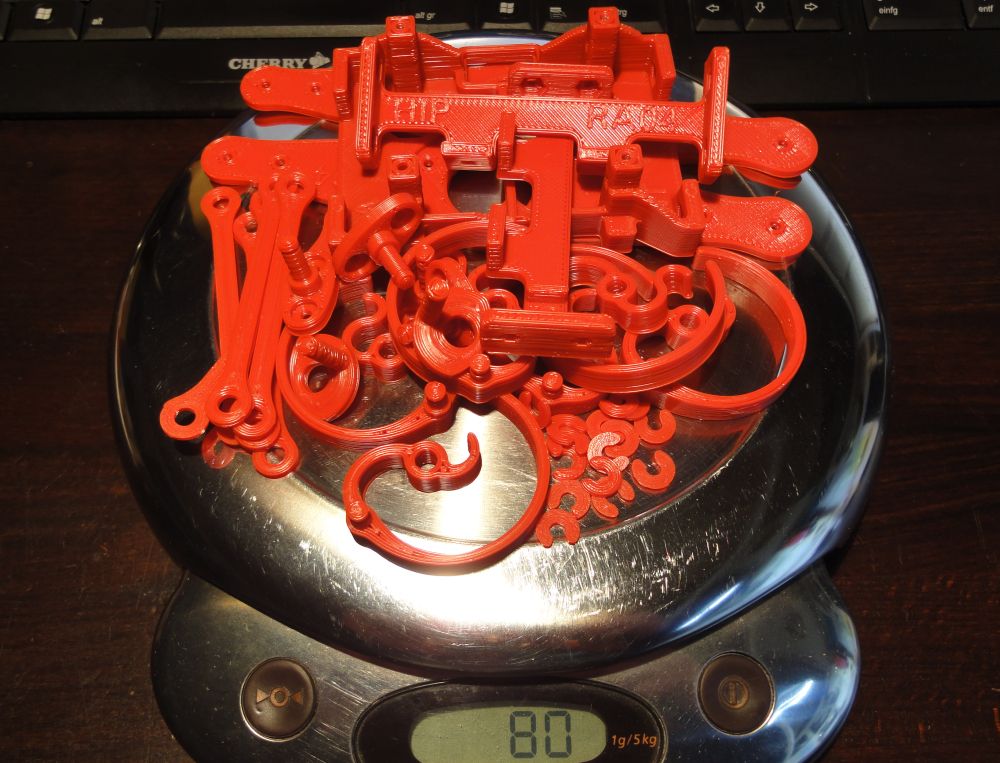
For the RepWalker you need about 80 g 3D-printed 😉.
RepWalker (Radow © 2014-05-03)
Assembly
RepWalker (Radow © 2014-05-03)
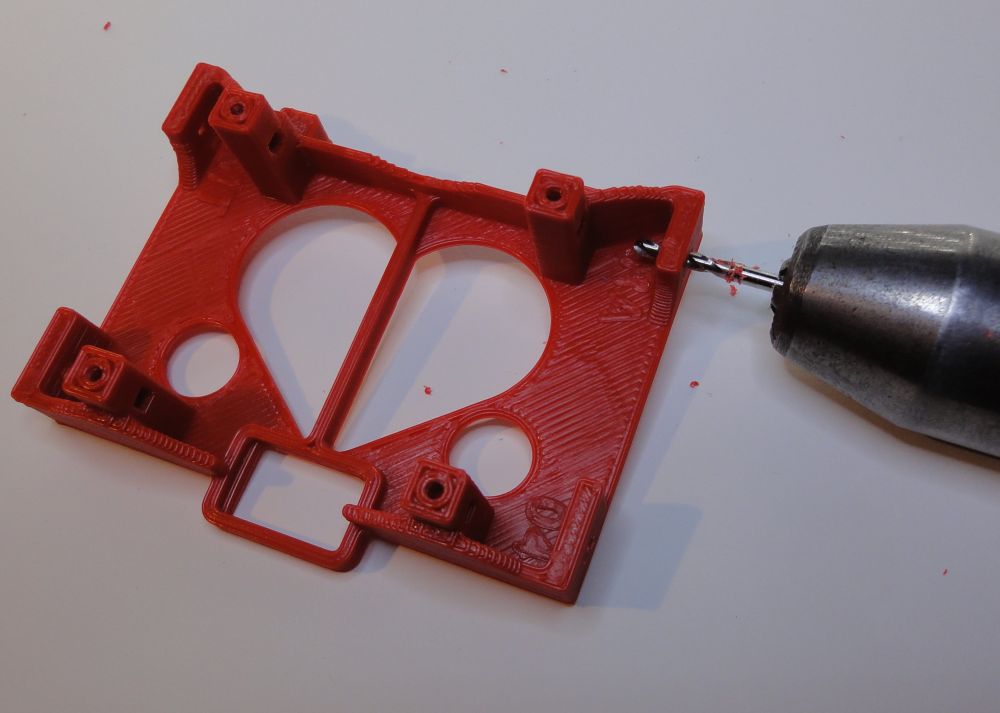
Nach dem Drucken muss man manche Löcher noch etwas aufbohren - ich mache das mit einem Handbohrer, damit das ABS nicht schmilzt.
RepWalker (Radow © 2014-05-03)
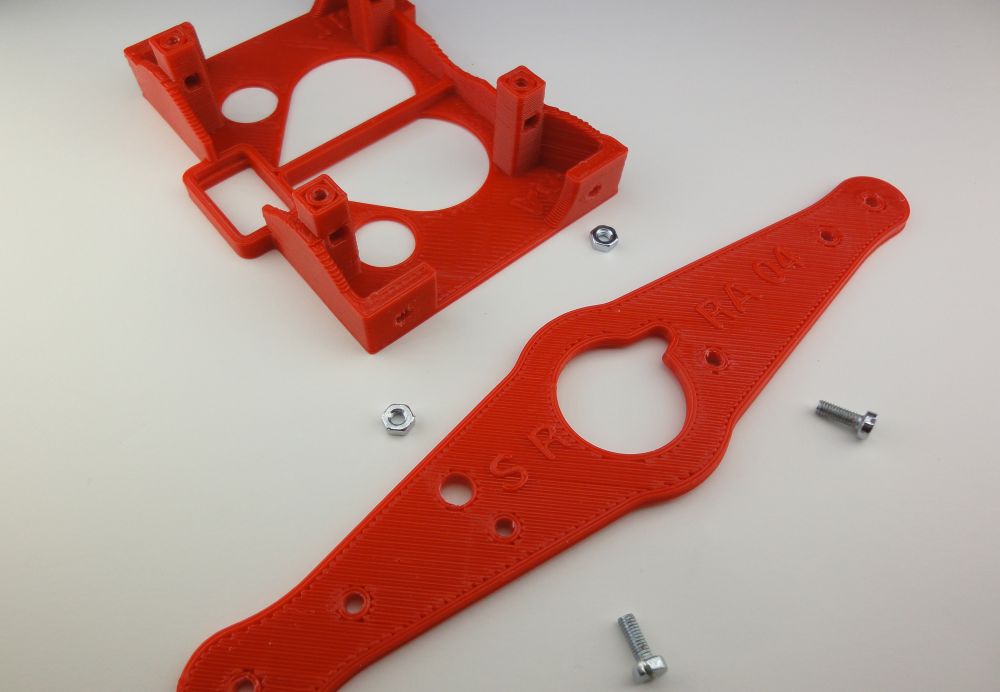
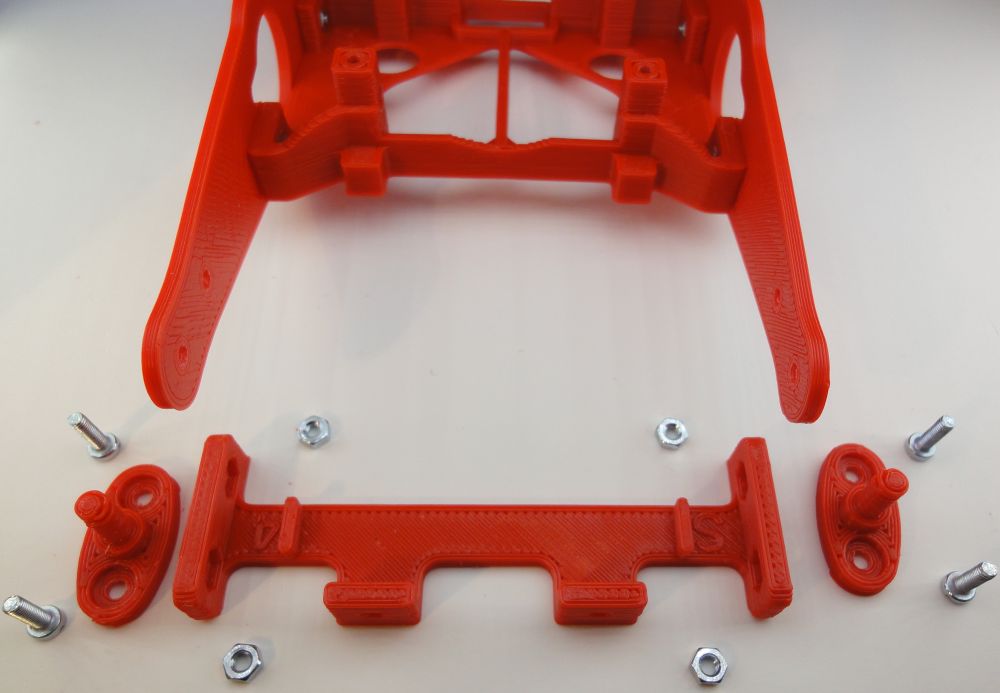
Montage der Hauptträger

RepWalker (Radow © 2014-05-03)

RepWalker (Radow © 2014-05-03)
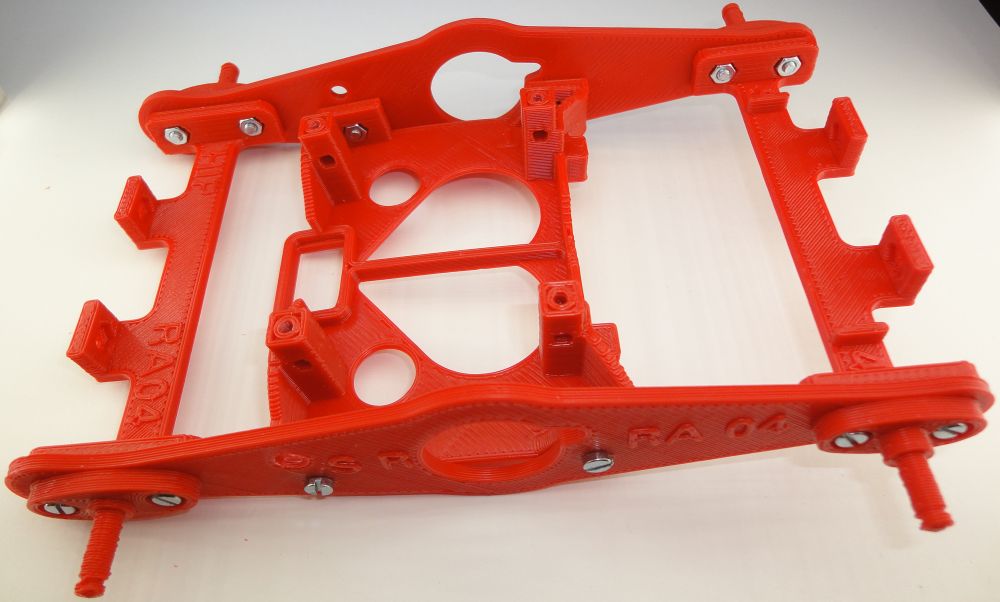
Heckbügel und Achsen der Hinterbeine.

RepWalker (Radow © 2014-05-03)
RepWalker (Radow © 2014-05-03)
RepWalker (Radow © 2014-05-03)
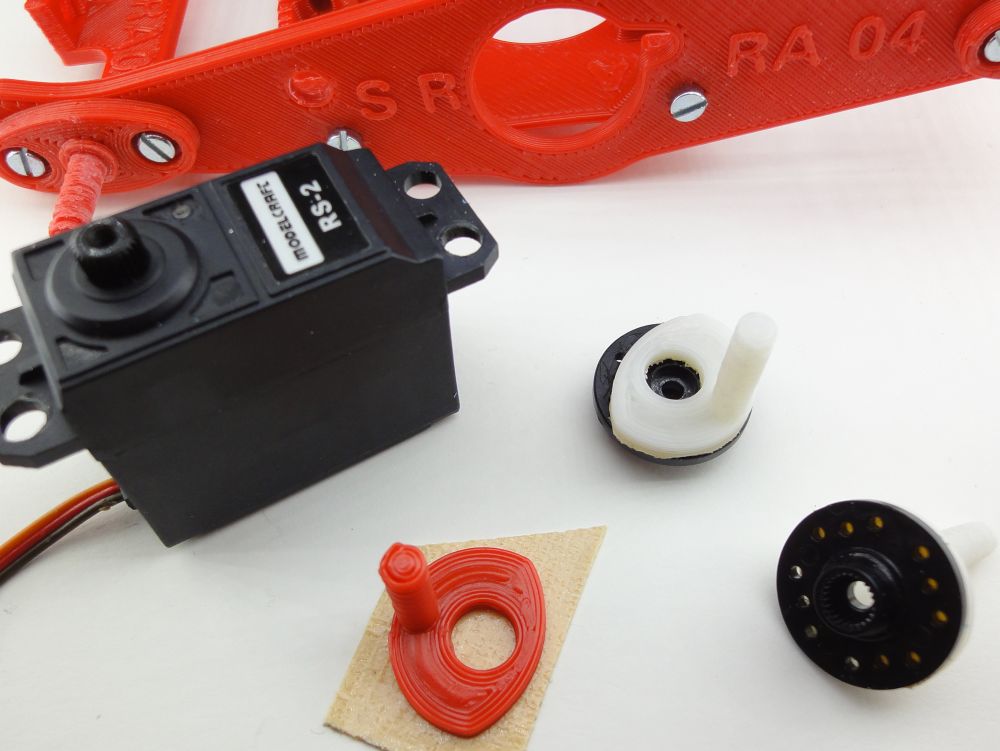
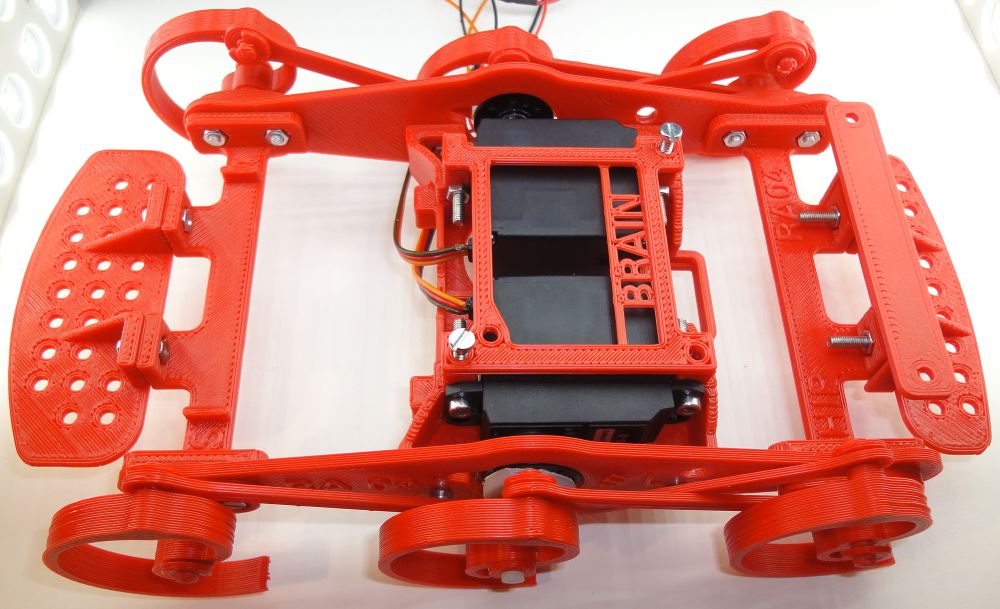
Die Servos müssen zunächst für den kontinuierlichen Drehbetrieb umgebaut werden - sieh unten. Die Kurbelscheiben der Mittelbeine kann man z.B. mit doppelseitigem Klebeband auf die Servoscheiben kleben.
RepWalker (Radow © 2014-05-03)
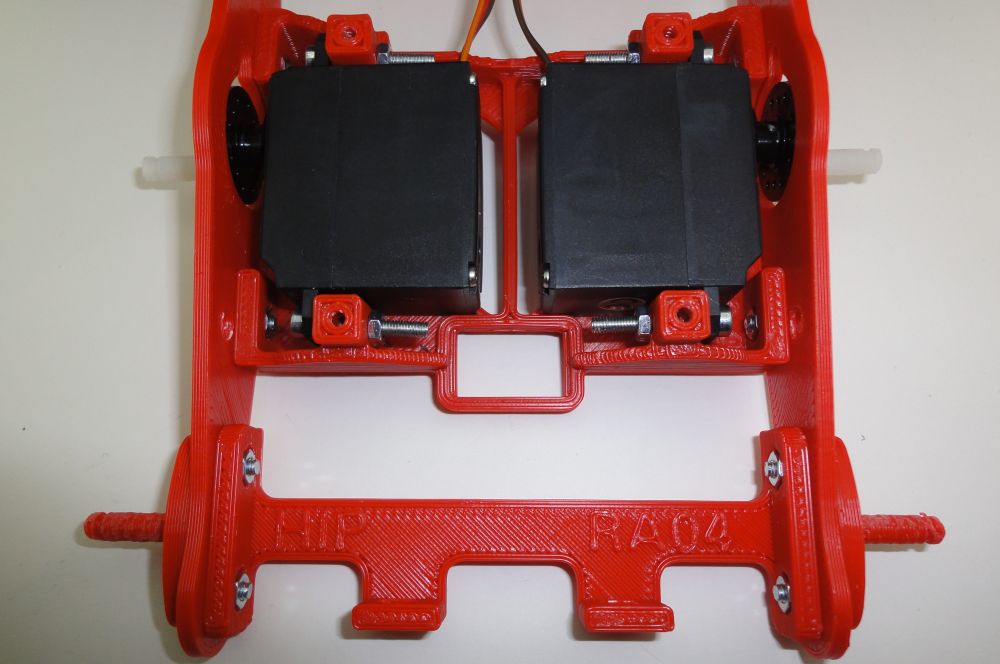
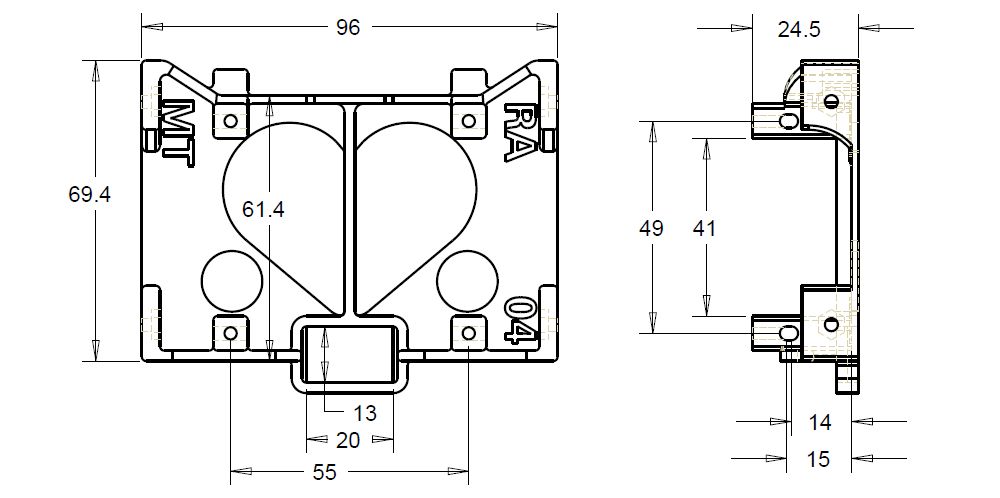
Die Servos bestimmten bei dieser Konstruktion die Breite des Repwalkers maßgeblich.
RepWalker (Radow © 2014-05-03)

Monage der Beine (Radow © 2014-05-03)
Pro Seite gibt es zwei Beinvarianten, die sich in der Länge der Stangenachse - oben am Bein - unterscheiden. Die linke und die rechte Seite sind gespiegelt aufgebaut.

RepWalker (Radow © 2014-05-03)
So wird die erste Treibstange aufgesteckt.

RepWalker (Radow © 2014-05-03)
Vormontage des Hinterbeins und der zugehörigen Treibstange.

RepWalker (Radow © 2014-05-03)
Nach diesem Strickmuster hat man die Stangen und das Mittelbein zu montieren - dann läuft alles parallel und frei.

RepWalker (Radow © 2014-05-03)
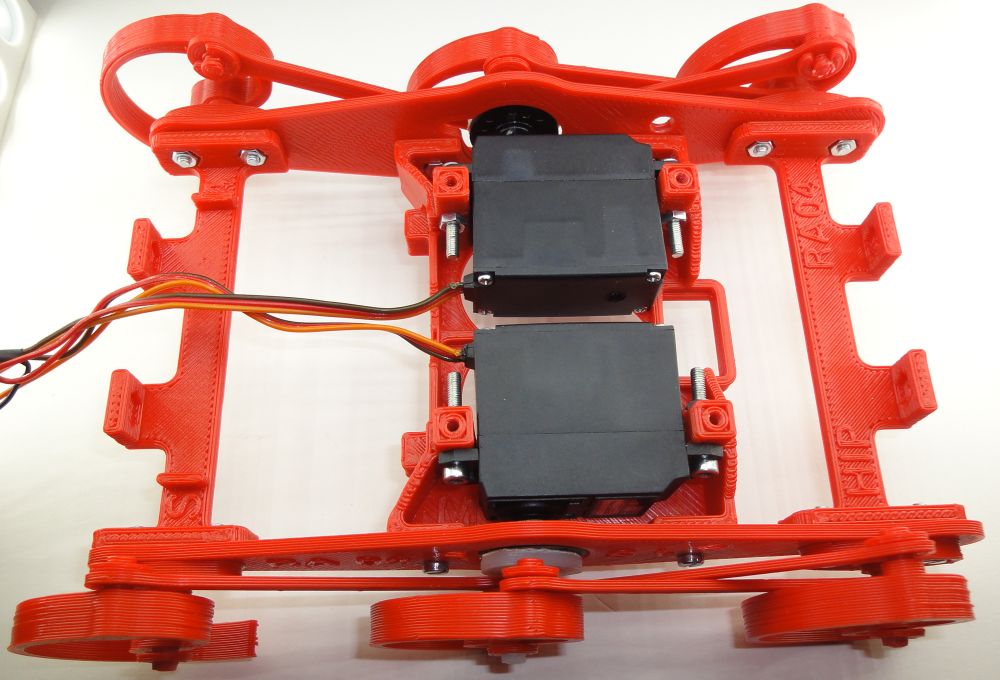
So sieht alles fertig montiert aus.

RepWalker (Radow © 2014-05-03)
Der Motangevorgang ist auf der anderen Seite spiegelbildlich zu wiederholen.
RepWalker (Radow © 2014-05-03)
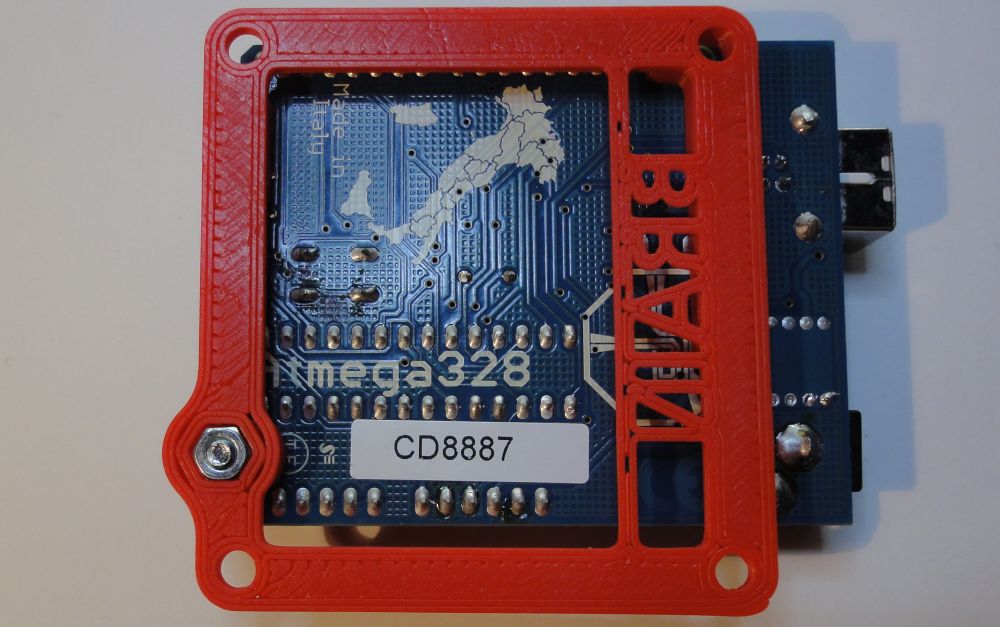
Auf dieser Trägerplatte wird später das Gehirn des Robotters in Form eines Arduino montiert. Auf den gelochten Plattformen kann man Sensoren oder z.B. ein Gehäuse montieren.
RepWalker (Radow © 2014-05-03)
Jeder Robotter sollte auch ein Herz haben

RepWalker (Radow © 2014-05-03)
Hier ist Platz für 4 AA Zellen zur Stromversorgung des Robotters.
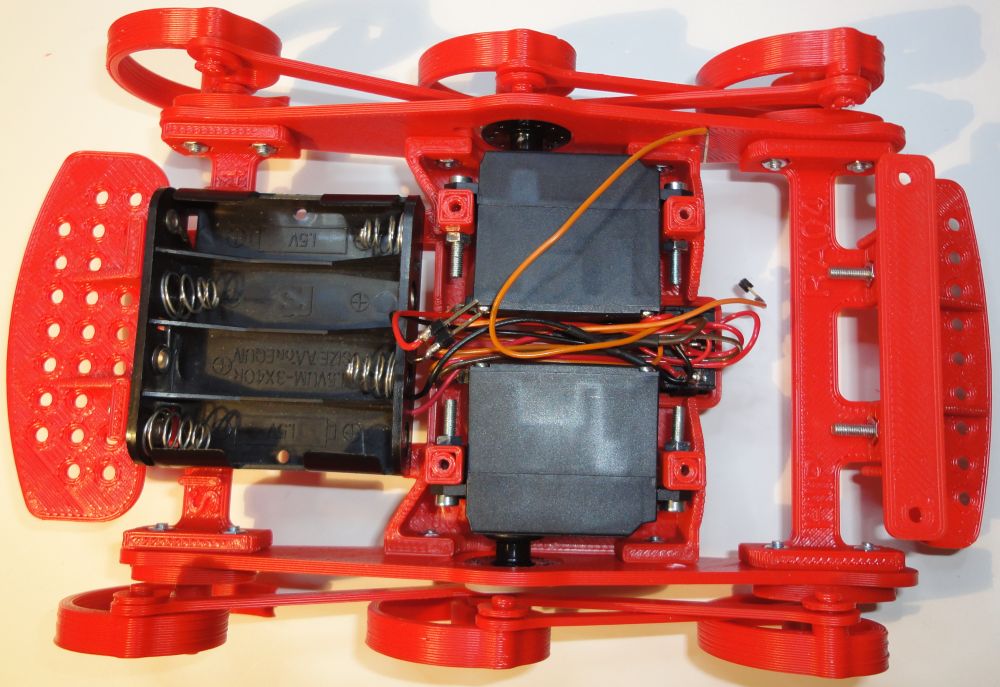
RepWalker (Radow © 2014-05-03)
RepWalker (Radow © 2014-05-03)
Fütterung des Gehirns mit künstlicher Intelligenz.
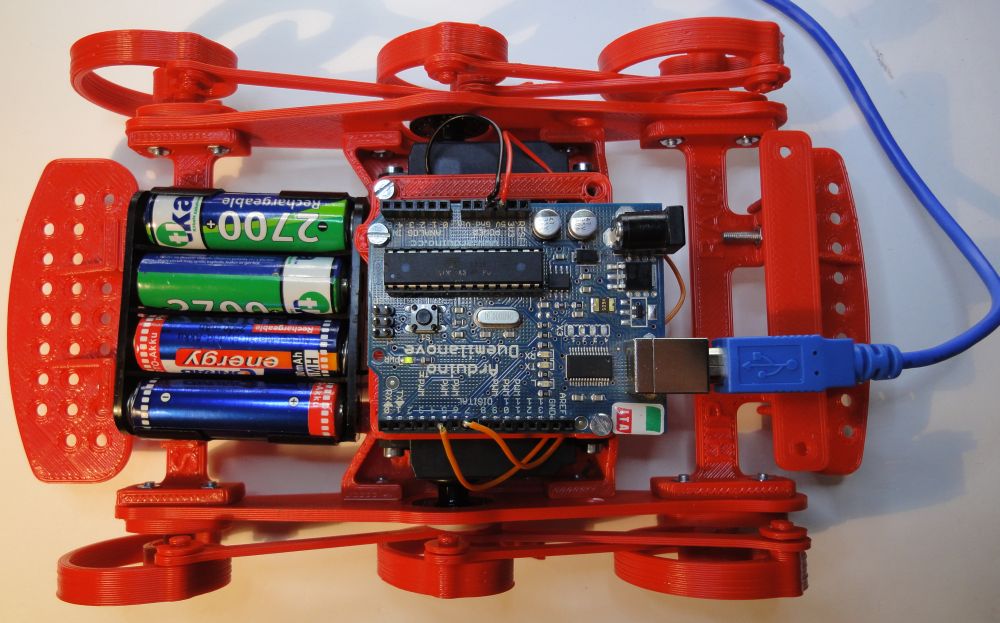
RepWalker (Radow © 2014-05-03)
RepWalker (Radow © 2014-05-03)
Convert servos to motors
Hier zeige ich Euch, wie man aus einem Servo einen Antriebsmotor bauen kann.
RepWalker (Radow © 2014-05-03)
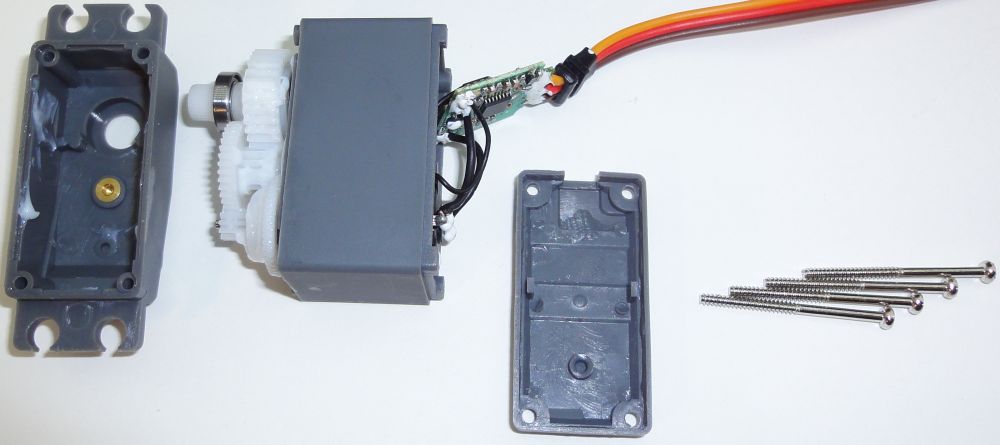
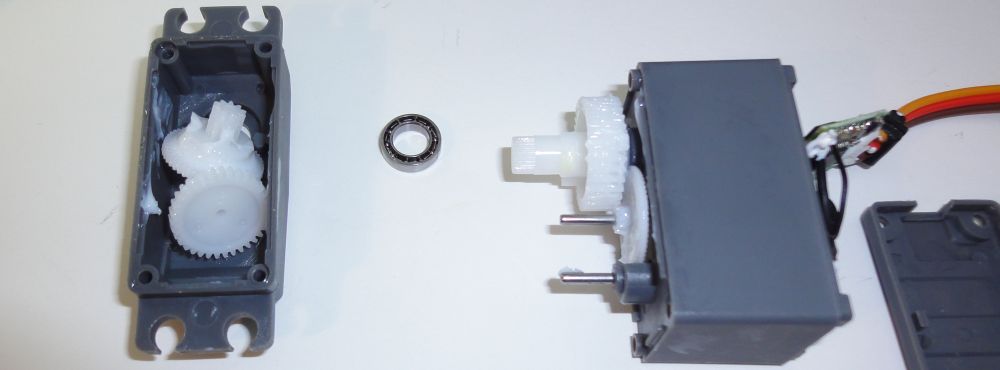
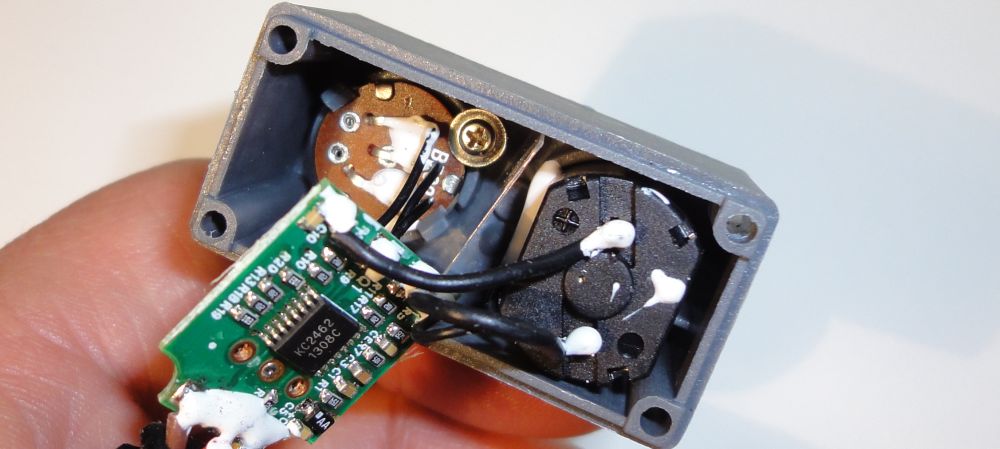
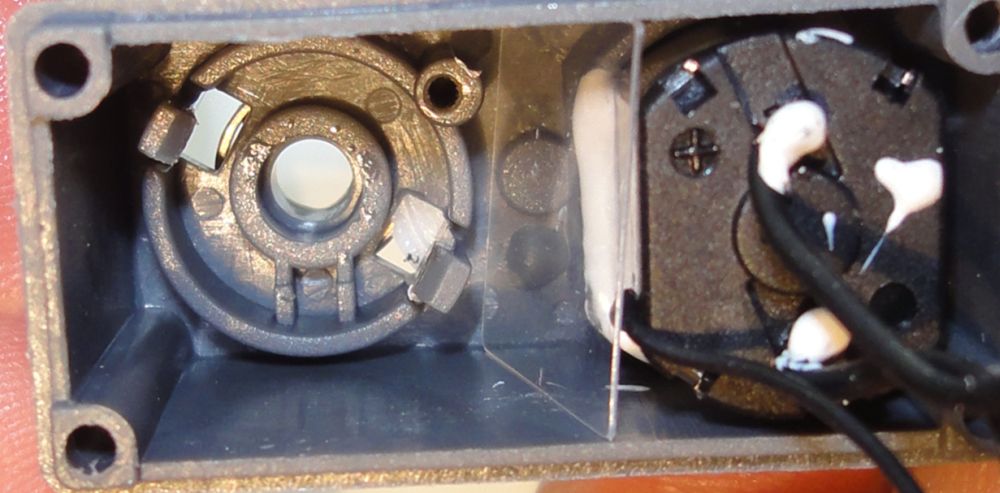
Zunächst ist alles sorgfältig zu zerlegen.
RepWalker (Radow © 2014-05-03)
RepWalker (Radow © 2014-05-03)
RepWalker (Radow © 2014-05-03)
RepWalker (Radow © 2014-05-03)

RepWalker (Radow © 2014-05-03)
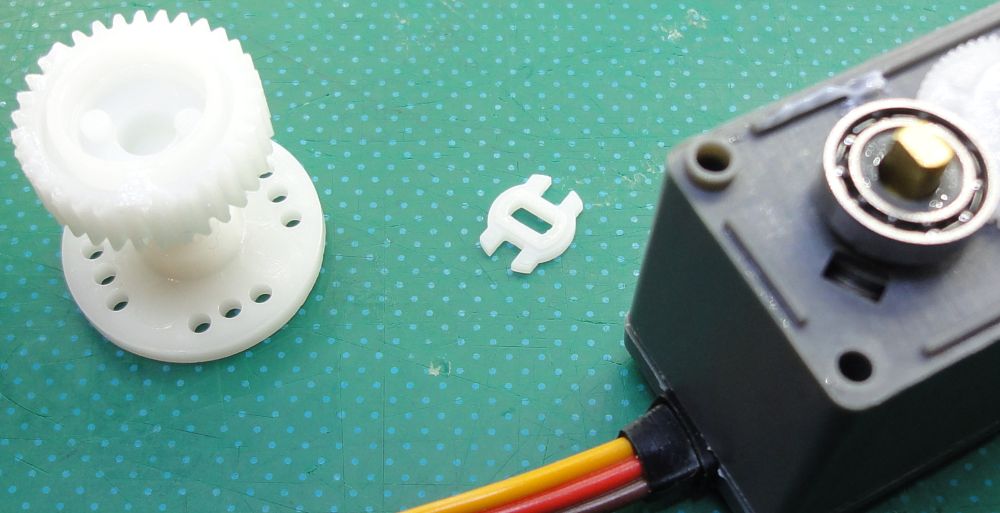
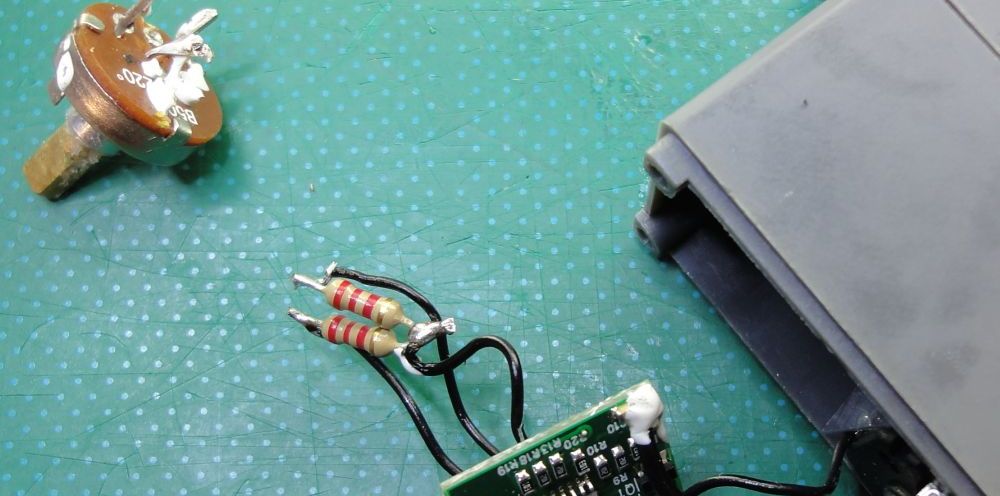
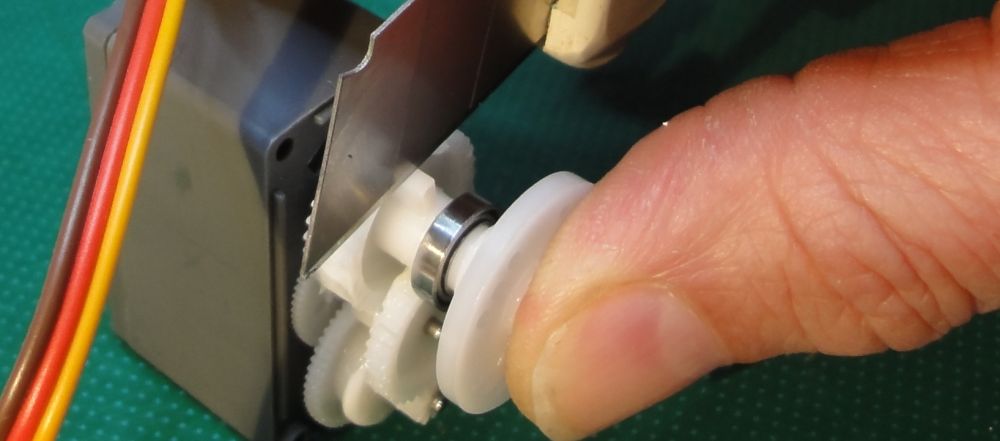
Das Potentiometer muss auf geeignete Weise außer Gefecht gesetzt werden. Ich habe hier einfach die Achse abgetrennt.

Man kann das Poti auch ganz entfernen und durch zwei Widerstände ersetzen.
RepWalker (Radow © 2014-05-03)
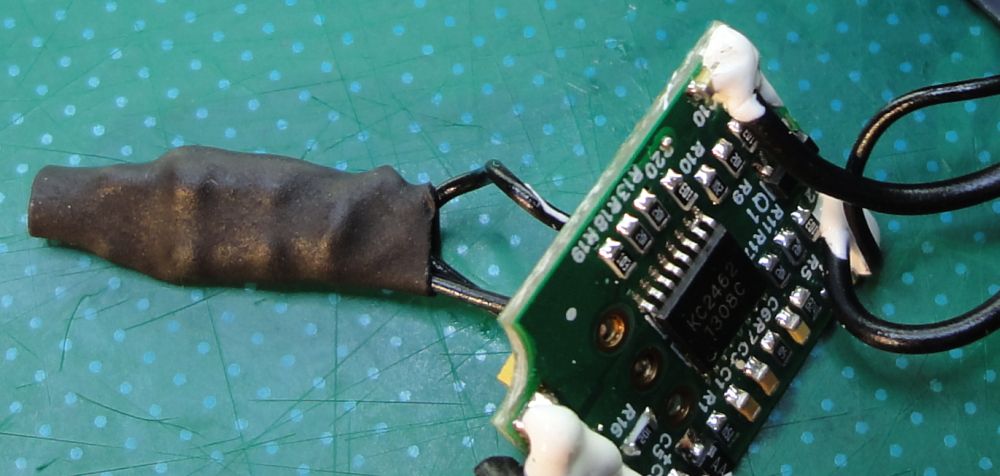
Ein Schrumpfschlauch verhinder dann, dass es in dem engen Gehäuse zu Kurzschlüssen kommen kan.
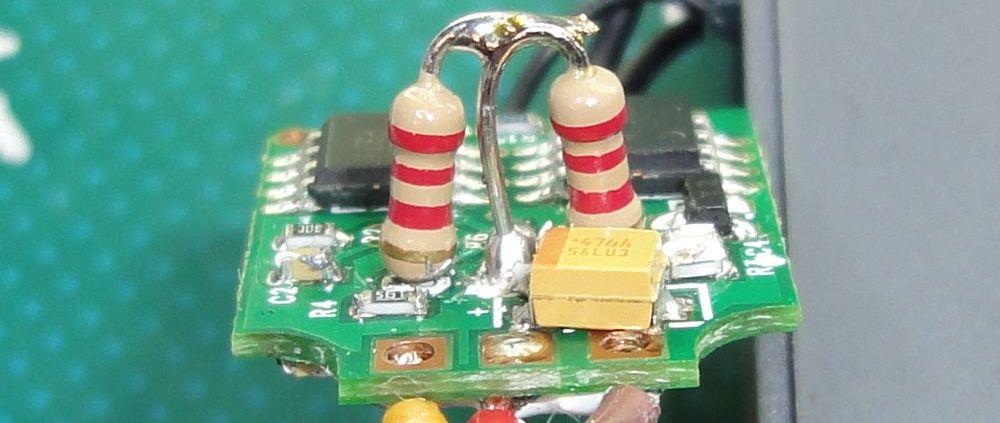
Wenn ausreichend Platz vorhanden ist, kann man die Widerstände auch mit auf die Platine löten
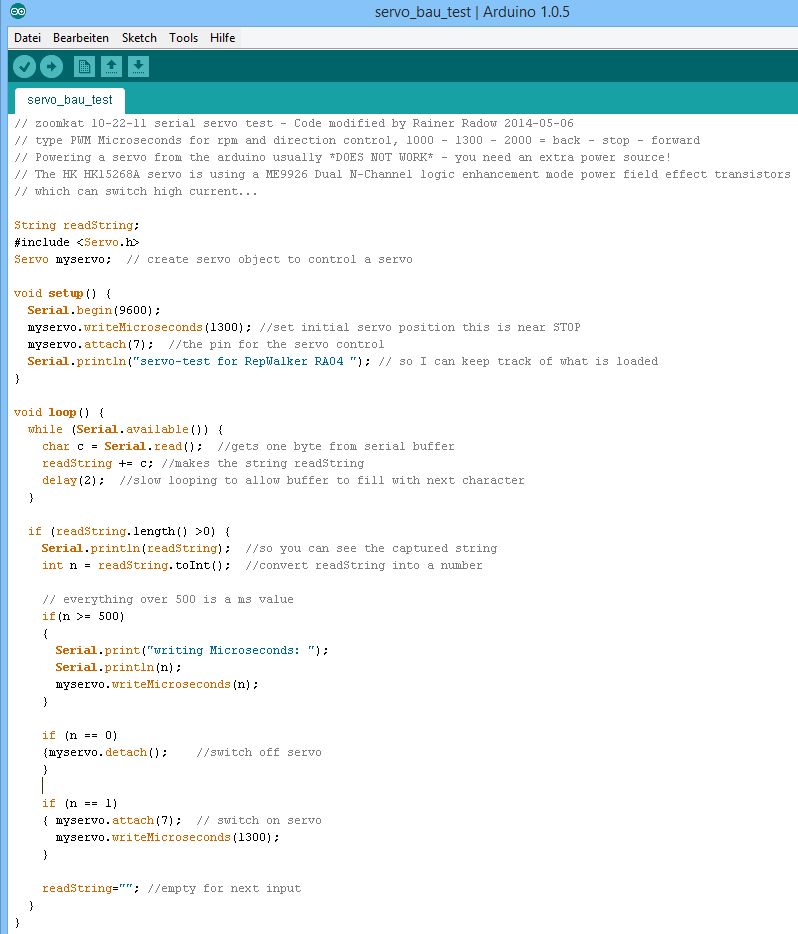
Mit der Arduino Servo.h Library testet man dann seinen neuen Motor

Vor dem Zusammenbau muss noch der Anschlag entfernt werden, der normalerweise den Servoweg mechanisch begrenzt.
STL files of all items for the RepWalker RA04
Mandatory parts to build the RepWalker RA04
| 01-muscle-torso-ra04.1.stl | 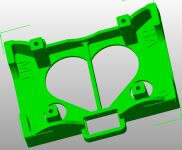 |
print 1 x | |
| 00-muscle-torso-plain-ra04.stl | 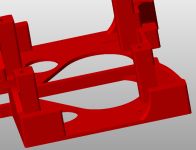 |
This is the same as 01-muscle-torso-ra04 but without holes for the servo. You can drill this afterwards with the servo as gauge. | |
| 02-spine-left-ra04.1.stl | 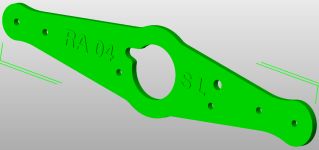 |
print 1 x | |
| 03-spine-right-ra04.1.stl | 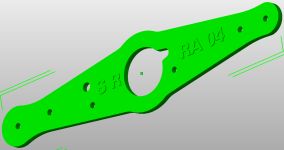 |
print 1 x | |
| 02-03-spine-left-and-right-ra04.1.stl |  |
Combination of part #2 and #3 on one tray | |
| 04-hip-ra04.1.stl | 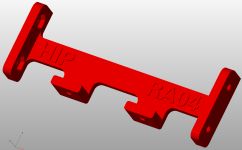 |
print 1 x | |
| 05-shoulder-ra04.1.stl | 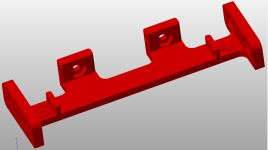 |
print 1 x | |
| 04-05-hip-and-shoulder-ra04.1.stl | 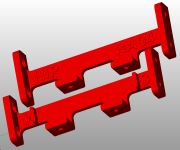 |
Combination of part #4 and #5 on one tray | |
| 06-hip-joint-ra04.1.stl |  |
print 2 x | |
| 07-shoulder-joint-ra04.1.stl |  |
print 2 x | |
| 08-ankle-ra04.1.stl |  |
print 2 x | |
| 10-hind-leg-right-ra04.1.stl |  |
print 1 x | |
| 11-hind-leg-left-ra04.1.stl |  |
print 1 x | |
| 12-foreleg-right-ra04.1.stl |  |
print 2 x | |
| 13-foreleg-left-ra04.1.stl |  |
print 2 x | |
| 10-11-12-13-legs-ra04.1.stl |  |
Combination of all 6 legs #10, #11, #12, and #13 on one tray | |
| 14-tendon-ra04.1.stl |  |
print 6 x | |
| 15-meniscus-5mm-ra04.1.stl |  |
print 12 x | print some more |
| 15-meniscus-5mm-15x-ra04.1.stl |  |
Combination of 15x part #15 on one tray |
Optional parts to pimp the RepWalker RA04
| 16-forehead-ra04.1.stl | 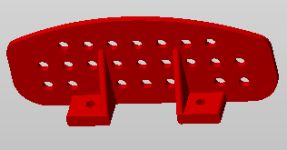 |
print 1 x | |
| 17-buttocks-ra04.1.stl | 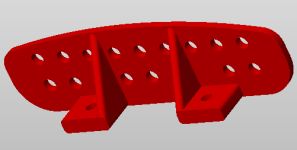 |
print 1 x | |
| 18-collarbone-ra04.1.stl |  |
print 2 x | |
| 20-brain-fastener-ra04.1.stl |  |
print 1 x |
Optional parts to build one servo dummy
(You need two)
| 30-servo-dummy-base-ra03.stl |  |
print 1 x | |
| 31-servo-dummy-axis-ra03.stl |  |
print 1 x | |
| 32-c-ring-9mm-ra03.stl |  |
print 1 x |
