Walky Roboter – 2017
Japanisches Original
Bei einer Recherche nach Laufrobotern war ich auf die Papierroboter des Japaners Kikousya? gestoßen. Er hat diverse Modelle dieser Art gebaut und beschreibt sie auf seiner Web-Seite. Ich "verliebte" mich sofort in diese Kreaturen und wollte sie unbedingt nachbauen. Die Japanische Vorlage war damals nicht erhältlich und dessen Erbauer reagierte auch nicht auf mein Anschreiben.

Japanisches Original mit Gummimotorantrieb - Kopiert von www.geocities.jp
Zum Nachbau standen mir nur die im Internet verfügbaren Fotos und Videos zur Verfügung. Die Fortbewegung dieses Laufroboters beruht auf der mechanisch zwangsgesteuerten Gleichgewichtsverlagerung seines Oberkörpers und dem dazu synchronisierten Voranschreiten des jeweils entlasteten Beins. Das generelle Bewegungsprinzip habe ich per 3D Simulation nachvollzogen. Anschließend waren einige reale Prototypen nötig, bis ein sicheres Schreiten realisiert werden konnte.

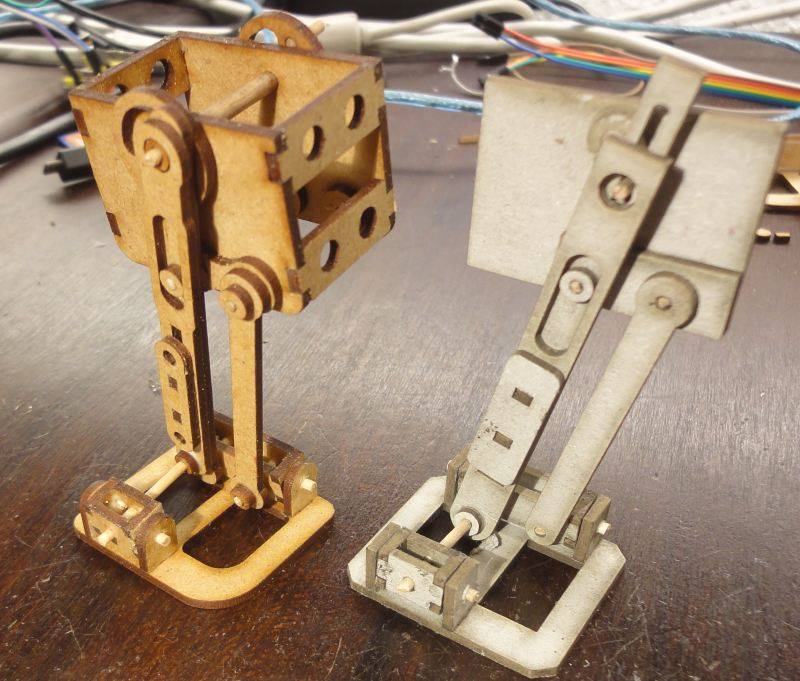
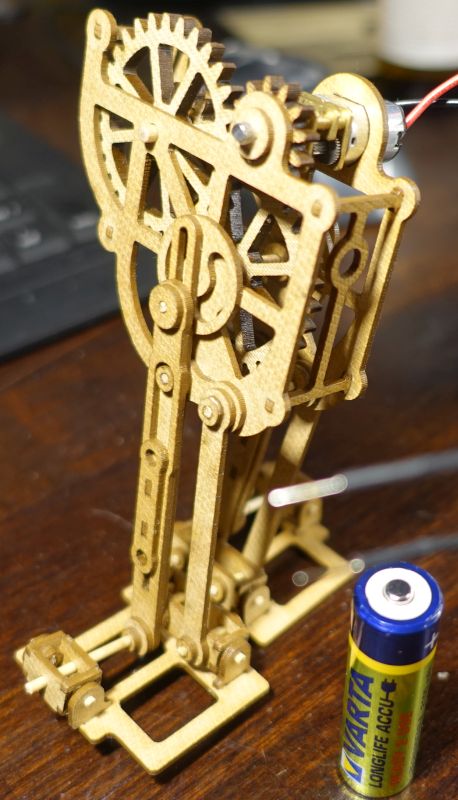
Meine gelaserte Konstruktion besteht aus einem 1,5 mm starkem Holzwerkstoff, der durch seine langfaserige Struktur außerordentlich belastbar ist. Die Zahnräder haben eine Evolventenverzahnung im Modul 1.2 und wurden aus 3 mm starkem Material gefertigt. Die Achsen sind aus 1,8 mm starken Zahnstochern erstellt worden. Holzleim hält alles zusammen.
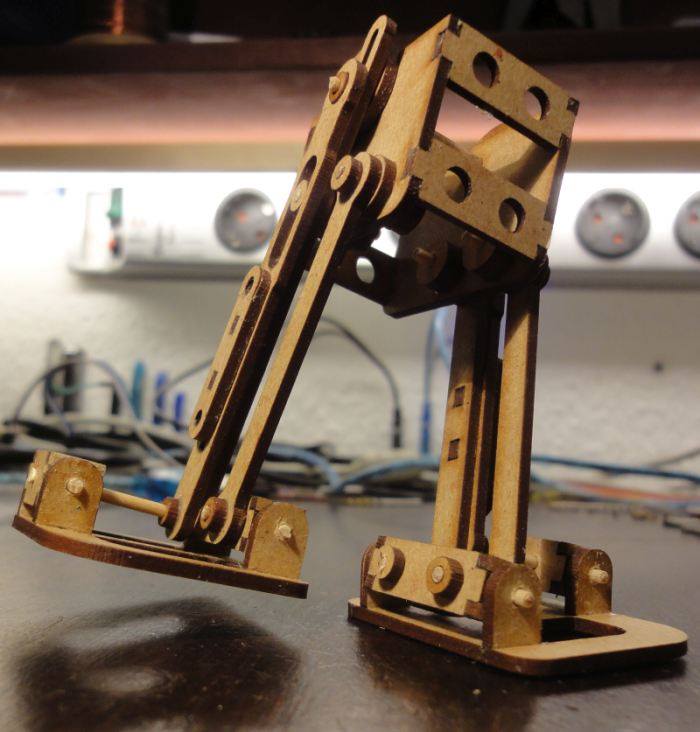
Mein Steam Punk Design
In Anlehnung an alte Uhrwerke habe ich den "Brustkorb" als offene Steam Punk Rahmenkonstruktion ausgeführt.
Durch einen besonderen Holz-Werkstoff konnte ich meine Konstruktion recht filigran ausführen.
Seine 1,5 Volt Antriebsbatterie kann mein Walky-Robot selber tragen. Dieses Modell läuft aktuell ganz ohne Elektronik und nur geradeaus und ist somit herrlich elektromechanisch...
